With the growing market penetration of electric vehicles (EVs), their end-of-life (EOL) considerations require careful attention. Chief among them is the lithium-ion battery (LIB) pack disassembly, which requires a high degree of automation to accommodate increasing volumes. However, robotic solutions for EV LIB disassembly must be sufficiently flexible to handle diverse pack designs. We describe the design, development, and testing of two end effectors, one for fastener removal and the other for lid removal, using four distinct pack enclosures of different designs. The solution for the autonomous detection and loosening of fasteners employed commercial 2D and 3D cameras mounted on the wrist of a robotic arm. The solution for the fastener removal had three key processing steps: 1) approximate localization of fasteners on the lid using images from a 2D camera, 2) precise localization and orientation based on a 3D camera, and 3) loosening of fasteners using a drive. Tests on multiple LIB pack enclosures of different shapes and sizes, placed in several orientations relative to the robotic arm, showed that the success rate of the proposed solution exceeded 90%, on average. The effectiveness of the solution for different pack designs and orientations demonstrated the autonomy and generality of the approach. Once effectiveness was established, the solution was improved to increase efficiency. We describe the iterative improvements that reduced the initial fastener detection and loosening process from approximately 20 seconds per fastener to ≈10 seconds per fastener. Because the selected hardware limited additional time reduction, a discussion on the potential for further acceleration, based on alternative image-capturing hardware, was included. In addition, the end effector contained a magnetic pick-off for removing the loosened fasteners and dropping them into a bin. This process was considered separately because a human typically employs his second hand for collecting fasteners. To attain a comparable endto-end speed, a separate robotic arm should be considered for fair comparisons. The end effector for lid removal employed springs to conform to the height variation of some LIB pack designs. The paper includes illustrative frames of key operations of the effectors and the tool for exchanging between the two end effectors.
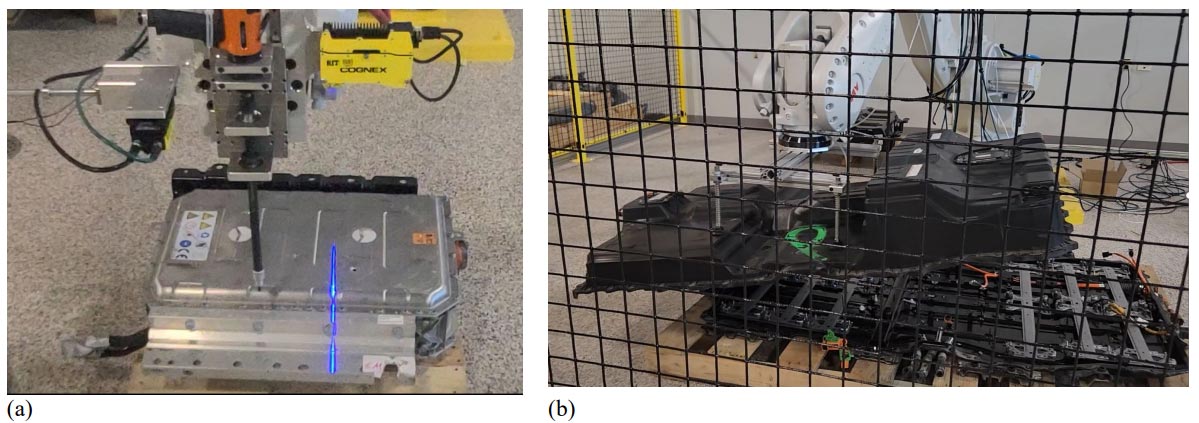
Figure 1: End effectors (a) fastener-removal end effector (b) lid-removal end effector.